compcogneuro/web: バリント症候群
このページは外部資料の日本語訳です。原文の見出し順と本文順を保ち、コード・URL・出典表記はできるだけ原形のまま残しています。
出典とライセンス
原典: https://github.com/compcogneuro/web/blob/main/content/attention-simulation.md
ライセンス: Text: CC BY 4.0; code: BSD 3-Clause。このページは日本語翻訳であり、変更点は翻訳とサイト内整形です。
+++ Categories = [“Simulations”, “Cognition”] bibfile = “ccnlab.json” +++ TODO: SIM を axon に変換します。現在、Leabra でのみ利用可能です:
このモデルは [[@^CohenRomeroFarahEtAl94]] に基づいており、生物学に基づいた全体的な構造と説明できるデータの範囲に関していくつかの改良が加えられています。
ネットワーク構造
完全に事前に指定されたネットワーク構造と接続を段階的に見てみましょう (つまり、この単純なアーキテクチャを手動で構築する方が簡単だったため、ネットワークはトレーニングされておらず、学習も行われません)。ご覧のとおり、ネットワークには、空間的にマップされた特徴配列を含む V1 のようなレイヤーから供給される、相互接続された Spatial パスウェイと Object パスウェイがあります。この単純なケースでは、各「オブジェクト」がこの配列内の単一の個別の特徴によって表され、空間が単一の次元に沿って編成されていると仮定しています。したがって、ユニットの最初の行は、7 つの位置のそれぞれにおける最初のオブジェクトの特徴 (キュー刺激として機能する) を表し、2 番目の行は、これらの同じ 7 つの場所における 2 番目のオブジェクトの特徴 (ターゲットとして機能する) を表します。
- 次に、ネットワークで
Wts->r.Wtを選択し、オブジェクトと空間ユニットをクリックして、接続パターンを通じてそれらがどのように機能するかを確認します。
オブジェクト処理経路には、ますます空間的に不変になる 3 つの一連の表現レイヤーがあり、各ユニットは下のレイヤーのオブジェクト定義フィーチャーの 3 つの隣接する空間位置にわたって折りたたまれます。オブジェクト経路の最高の完全に空間的に不変なレベルが出力層の役割を果たし、オブジェクトを検出するための反応時間 (RT) の測定に使用されることに注意してください。これは、ターゲット 出力 (オブジェクト 2) が 0.5 のアクティビティを超えるたびにネットワークのセトリングを停止することによって発生します (これが発生しない場合、セトリングは 220 サイクル後に停止します)。したがって、しきい値に達するまでのサイクル数は RT の代用となります。
空間処理経路には、空間解像度のレベルが異なる一連の 2 つの空間表現層があります。オブジェクト経路と同様に、空間経路の各ユニットは 3 つの隣接する空間位置を表しますが、オブジェクト経路とは異なり、これらのユニットは特定の特徴に敏感ではありません。場所ごとに 2 つのユニットにより、空間経路の両方の層に分散表現が提供されます。この冗長性は、この経路への部分的な損傷の影響を実証するのに役立ちます。
複数のオブジェクトを認識する
このモデルで調査する詳細な行動データの多くはポズナー空間キューイングタスクに関するものですが、視覚的注意のより基本的な機能的動機は、複数の物体が同時に提示された場合に物体認識を促進することであると考えられます。 したがって、2 つのオブジェクトの空間分布の関数として、ネットワークのオブジェクト認識能力を簡単に調査することから始めます。これは、この比較的単純なモデルを使用して発生する可能性のある空間処理とオブジェクト処理の間の相互作用の種類についての概要を提供します。まず、ネットワークに提示するイベントを見てみましょう。
- イベントを表示するには、
MultiObjsボタンをクリックします (Test行の下にあり、MultiObjsとも表示されます)a。
3 つのイベントが表示されるはずです。最初のイベントには、異なる空間位置に存在する 2 つの異なるオブジェクト (フィーチャ) があります。ターゲット オブジェクトのアクティベーションがわずかに高い (つまり、より顕著である) ため、他のオブジェクトよりもこのオブジェクトが確実に選択されることに注意してください。次のイベントでは、2 つの同じオブジェクト (ターゲット) が異なる場所に表示されます。最後に、最後のイベントには、同じ空間位置に 2 つの異なるオブジェクトがあります。図から明らかなように、オブジェクトが同じ場所に重なっている場合、オブジェクトが異なる場所にある場合よりも認識するのがかなり困難です。異なるオブジェクトとは対照的に、同じオブジェクトのコピーのみが存在する場合は、オブジェクトを認識するのが明らかに簡単ですが、この違いは、提示されたオブジェクトの数が少ない場合には重要ではない可能性があります。
次に、これらの予測をモデルでテストしてみましょう。
NetworkのActの表示に戻ります。InitおよびStep Trialを実行します。
これにより、最初のイベントがネットワークに提示され、ターゲット ユニットのアクティベーションが出力層のしきい値 0.5 を超えると、ネットワークは整定を停止します (つまり、一度に 1 サイクルずつネットワークのアクティベーションを更新します)。 ネットワークが右側のよりアクティブな入力に比較的迅速に空間的注意を集中し、オブジェクト パスウェイがそのターゲット アイテムを表すため、出力アクティビティが比較的早くしきい値を超えることがわかります。
- その後、残りのイベントを
Step Trialします。
最初の 2 つのイベントではネットワークが比較的早く安定しましたが、空間の同じ領域でオブジェクトが重なる 3 番目のイベントではネットワークの速度が低下したことがわかりました (最後のイベントではそれほど遅くない場合もあります)。
-
Test Trial Plotをクリックすると、各イベントのRT反応時間 (出力がしきい値に達するまでのサイクル数) のプロットが表示されます。 -
StepをTrialの代わりにCycleに設定し、項目を 1 ステップずつ実行して、ネットワークのサイクルごとの更新を確認することもできます。 また、ネットワークの右下にある VCR 巻き戻しボタンを使用して、巻き戻して、ネットワークの安定化がどのように展開したかを正確に確認することもできます。 -
全体的なデータ パターンをよりよく理解するには、
Test Trial Plotをクリックして戻り、InitおよびTest Runを数回実行します。少量のノイズがあるため、結果は毎回少しずつ異なりますが、全体的には非常に一貫しています。
全体として、ネットワーク全体では、同じ空間位置に出現するオブジェクトに対してより困難が生じており、空間的な注意を払っても 1 つのオブジェクトに焦点を合わせることができないことがわかります。条件別の全体的な平均 RT サイクルは、TrialStats Plot テーブルに報告されます。そのタブをクリックすると、データ ポイントの上にカーソルを置くと (または [Table] ボタンをクリックすると) 平均統計が表示されます。
{id=”質問_rt”}
TrialStatsテーブルから各条件のRT:Mean値をレポートします。
空間表現では、あるオブジェクトに別のオブジェクトに注意を割り当てることで、オブジェクトの処理が容易になることに気づいたはずです。重要なコントラスト条件は、両方のオブジェクトが同じ場所にあり、空間的注意によってそれらを分離できなくなり、オブジェクトの経路が両方のオブジェクトを同時に処理しようとする状態になることです。
Posner 空間キューイング タスク
{id=”figure_posner-タスク”}
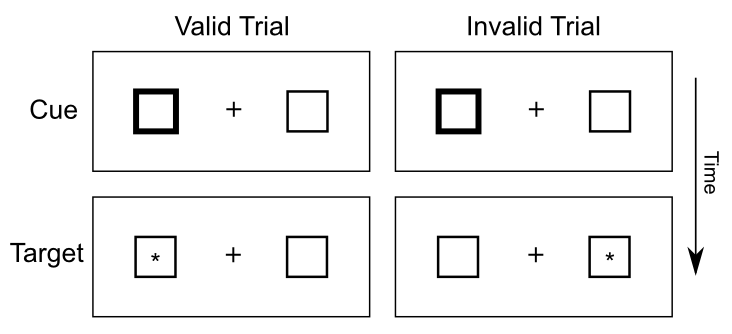
ここで、[[#figure_posner-task]] に図示されている、このモデルが Posner 空間キューイング タスクでどのように機能するかを見てみましょう。
TestをStdPosnerに設定し、Initをクリックします。 次に、StdPosnerテーブル ボタンをクリックしてイベントを表示します。
ここには 3 つの グループ のイベントが示されており、中立 キュー (キューなし)、有効 キュー、および 無効 キューに対応します。中立の場合にはイベントが 1 つだけあり、それは左側の位置でのターゲット オブジェクトの表示です。有効なケースでは、最初のイベントは左側に提示されるキューで、続いてターゲット イベントが続き、ターゲットも左側に表示されます。無効なケースには同じキュー イベントがありますが、ターゲットは空間の右側 (反対側) に表示されます。ネットワークのアクティベーションは、グループ内のキュー イベントとターゲット イベントの間ではリセットされませんが、グループの終了時 (ターゲットの後) にリセットされます。 したがって、キューイング イベントからの残留アクティベーションが持続し、ターゲット イベントの処理に影響を与える可能性がありますが、アクティベーションは異なるトライアル タイプ間でクリアされます。
-
Step Trialを実行して、ニュートラル トライアル、有効および無効トライアルのキュー / ターゲット シーケンスを処理します。 これらのケースをステップ実行し続けるときは、ステップバイサイクルするか、VCR 履歴を確認して、Posner タスクの 3 つの条件のそれぞれにネットワークがどのように応答するかを記録する必要があります。 -
次に、
Test Trial Plotに切り替え、Test Runを数回実行して統計を収集します。 次に、TrialStatsプロットをクリックして結果を確認します。
{id=”question_posner”}
空間キューの影響は、各条件の整定時間 (RT) の観点から、その後のターゲットの処理にどのように影響しますか?
TrialStatsテーブルから条件/グループごとの平均データをレポートします。変更自体だけでなく、Posner タスクへの変更が観察されるメカニズムの理由も説明してください。
このタスクに対する若者 (大学生など) の一般的な反応時間は、おおよそ次のとおりです。 中立、370 ミリ秒。有効な 350 ミリ秒。無効な 390 ミリ秒。注意集中の影響については中立状態の両側に約 20 ミリ秒を示します。これらのデータは、一般に、取得した結果のパターンと一致するはずです (無効な効果は少し高くなります)。ただし、データをより厳密に適合させるには、各試行タイプのセトリング サイクル数に約 310 ミリ秒の一定のオフセットを追加する必要があります。この一定のオフセットは、シミュレーションに含まれないタスクの他のすべての側面 (応答の生成など) を実行するのに必要な時間と考えることができます。また、ネットワーク内での整定の 1 サイクルが人間の処理の 1 ミリ秒に相当することにも注意してください。この関係は自動ではありません。この特定のモデルでは 2 つが一致するように、アクティベーション更新の時定数 (デフォルトの 3.3 ではなく Act.Dt.VmTau = 7) を調整しました。
空間経路強度の影響
次に、ネットワークのパフォーマンスに対する のパラメータの影響を調べてみましょう。これは、ネットワークがこのタスクで通常のパフォーマンスをどのように取得するかを明らかにするのに役立ちます。まず、SpatToObj を 2 から 1.5 に減らし、次に 1 に減らしてみます。これにより、対応するオブジェクト パスウェイ レイヤーに対する 2 つの空間パスウェイ レイヤーの影響が軽減されます。
SpatToObjを 1.5 に設定してTest Runを数回実行し、その後 1 に減らします。パラメーターの変更はTest Runボタンを押すと有効になるため、Initを押す必要はありません (必要に応じてプロットをリセットします)。
有効な条件と無効な条件の両方の影響が少ないことがわかります。これはまさに予想どおりです。オブジェクト システムに対する空間的注意の影響が少ないため、無効なキューによって速度が低下することはなく、同様に、有効な場合の影響も少なくなります。
SpatToObjを 2 に戻し、V1ToSpat1の値を 0.6 から 0.55、次に 0.5 に減らし、それぞれについて数回Test Runを実行し、サイクル平均を記録することで、V1 層から空間表現への影響を減らします。
ここで最も興味深い効果は無効な試行にあり、V1ToSpat1 値が低下するにつれてネットワークにかかるサイクル数が増加し、最終的に 220 の最大サイクル制限内で正しい答えを決定できなくなります。 V1 が空間経路に及ぼす影響が少ないため、新しい位置 (たとえば、キューの反対側に提示されたターゲット) での入力が、キューの位置に残っている空間活性化を克服することがますます困難になります。これは、空間経路がボトムアップ入力に対する感度と、時間の経過とともに空間的注意の焦点を維持する能力との間のバランスをとる必要があることを示しています。 このネットワークでは、このバランスを、(SpatToObj パラメーターによって制御される) オブジェクト経路に対する空間経路の影響とは別に設定できますが、これは [[@^CohenRomeroFarahEtAl94]] モデルには当てはまりません。
- 続行する前に、
V1ToSpat1を 0.6 に戻します (またはDefaultsボタンを押します)。
ポズナーと網膜偏心を閉じる
追加の操作の 1 つは、キューとターゲットの偏心 (視距離) です。それらがより近くに提示された場合、注意を引く効果が少なくなることが予想され、近くの場所が合図によって部分的に活性化された場合には促進効果さえも得られないと予想されるかもしれない。
TestをClosePosnerに設定し、Networkを見ながらInit、Step Trialを実行し、次にTest Trial Plotを見ながらTest Runを数回実行します。
重複する一連の空間表現がアクティブ化されていることがわかり、プロットを見ると、中立の場合と比較して、無効な場合には信頼性の高い遅延が存在しないことがわかります。
- 続行する前に、
TestをStdPosnerに戻します。
空間経路障害の影響
前に述べたように、[[@^PosnerWalkerFriedrichEtAl84]] は、頭頂葉皮質の一方の半球に損傷を負った患者は、ポズナー空間キューイング課題の無効な試行において異なるパフォーマンスの障害を示すことを示しました。具体的には、キューが無傷の半球によって処理される空間側(つまり、病変の同側)に提示され、その後、標的が病変のある半球によって処理される場合、それらは遅くなります。患者は、無効な症例と有効な症例の間で 120 ミリ秒の差を示し、有効な合図の RT は約 640 ミリ秒、無効な合図の RT は 760 ミリ秒でした。これらのデータは、有効な合図の RT が 540 ミリ秒、無効な合図の RT が 600 ミリ秒で、約 60 ミリ秒の無効-有効差を示した対応する (高齢の) 対照被験者と比較できます。
ご想像のとおり、高齢者の速度は通常の若年成人よりも遅く、脳に何らかの損傷を負った高齢者は、その損傷の全身的な影響により、依然として速度が遅いことに注意してください。この場合、これらの注意現象における頭頂葉の特定の関与に興味があるため、一般化された効果から特定のものを区別するように注意する必要があります。患者に特定の注意力の問題があるかどうかを判断するには、まずデータを「正規化」する方法を見つけて、これらの異なるグループ (モデルを含む) 間で有用な比較ができるようにする必要があります。高齢者対照のデータを定数係数で割ることによって正規化し、成人の正常者 (またはモデル) について報告されたのと同じ基本数値を取得します。脳損傷の特定の影響がある場合、適切に正規化されている場合でも、反応時間のパターンが成人の正常とは異なることがわかるはずです。
適切なスケーリング係数を見つけるには、さまざまなグループの有効な RT 間の比率を使用します。理想的には、全体的な速度低下の適切な尺度となる中立的なケースを使用したいと考えますが、患者と高齢者の対照について利用できるのは有効な試験データと無効な試験データのみです。したがって、高齢者対照と成人健常者を比較するために、成人の有効 RT である 350 ミリ秒を取得し、それを高齢者対照被験者の有効 RT である 540 ミリ秒で割ると、比率は 0.65 になります。 ここで、高齢者コントロールの無効 RT (600 ミリ秒) にこの係数を乗じると、成人の正常な無効 RT (390 ミリ秒) に近い値が得られるはずです。実際、適合は完璧です – 600 * .65 = 390。したがって、高齢者の対照は成人の正常者とまったく同じように行動するように見えますが、一定の速度低下要因があります。
ただし、この正規化手順を患者のデータに適用すると、結果はうまく適合しません。したがって、再び 350 ミリ秒を有効な RT の 640 ミリ秒で割ると、比率は 0.55 になります。次に、760 * .55 = 418 を実行します。これは、成人の正常な無効時間の 390 ミリ秒よりも大幅に遅くなります。これにより、正規化手順によって患者の全体的な速度の低下が考慮された場合でも、無効な試験では患者の速度が特に遅くなっていることが明らかになります。この速度の低下の違いにより、これらの患者は注意を解くのが難しいという仮説が生まれました。
次に、モデルに損傷を与え、それが患者のデータをシミュレートするかどうかを確認します。しかし、このモデルは脳損傷による全般的な影響(おそらく腫れやその他の要因によって引き起こされる)を受けず、また「老化」しないため、病変の特定の影響のみを持つ成人被験者とまったく同じように動作すると予想されます。 したがって、モデルのパフォーマンスを正規化された患者の値と比較します。同等の RT 測定値を得るためにモデルの整定時間に 310 ミリ秒の定数を追加することもできますが、定数要素を差し引いて、無効なケースと有効なケースの差を比較する方がいくらか簡単です。
- モデルを損傷するには、
Lesionボタンをクリックし、LayersとしてLesion spat12を選択し、LocationsとUnitsをLesionHalfのままにしておきます。これにより、空間レイヤーの右半分のみが損傷され、各位置の 2 つの空間ユニットのうち 1 つだけが損傷されます。 (つまり、部分的な病変)。ネットワーク ビューでr.Wtを選択し、これらのユニット (Spat1の場合は右側の後ろ 2 つのユニット、Spat2の場合は右後ろのユニット) の重みがゼロになっていることを確認します。Networkを監視しながらInit、Step Trial、次にTest Trial Plotを監視しながらTest Runを実行します。 次に、TrialStatsテーブルをクリックします (既存のウィンドウを閉じて、必ず新しいテーブルを取得してください。毎回新しいテーブルが再生成されるため、既存のテーブルは更新されません。また、プロットに表示されているすべての統計情報がレポートされるため、病変モデルからのみ結果を取得するためにInitを実行したことを確認してください)。
{id=”question_posner-lesion”}
TrialStatsテーブルから得られた平均をレポートします。
{id=”question_posner-無効”}
無効と有効の差を計算し、最初にそれを無傷のネットワーク内の同じ差と比較し、次に上記で説明した正規化された患者のデータと比較します (418-350=68 ミリ秒)。
特定の「解放」メカニズムを (少なくとも定性的に) 持たなくても、見かけの解放不足をシミュレートできることがわかったはずです。
リバースポズナー
このモデルをサポートするもう 1 つの情報源は、キューイング タスクの逆の構成の患者データのパターンから得られます。この場合、キューは空間の損傷側に提示され、無効なターゲットは無傷側に提示されます。興味深いことに、[[@^PosnerWalkerFriedrichEtAl84]] のデータは、患者のこの状態に対する無効と有効の反応時間の差が非常に減少していることを明確に示しています。したがって、通常の対照データと比較して、患者は空間の無傷な側に注意を切り替えることが容易であるため、無効なコストが少なくなるように思われます。 さらに、手がかりと標的が損傷を受けている側に提示される場合、無傷の側に比べて、患者に対する有効な手がかり効果は少なくなるように思われる。これについてモデルが何を言っているか見てみましょう。
TestをReversePosnerに設定し、Networkを見ながらInit、Step Trialを実行し、次にTest Trial Plotを見ながらTest Runを数回実行します。
ネットワークでは、無傷のネットワークと比較して、有効なトライアルと無効なトライアルの差が減少していることがわかります。したがって、合図の効果は少なく、有効な試験に対する促進は少なく、無効な試験に対する干渉は少なくなります。これはまさに [[@^PosnerWalkerFriedrichEtAl84]] データに見られるパターンです。モデルでは、ターゲットが提示された空間のより強い無傷の側が、手がかりが提示された空間の損傷した側と競合するのがそれほど困難ではないため、これが発生します。対照的に、解放理論では、逆ポズナー タスクの損傷したネットワークは、標準ポズナー タスクの無傷のネットワークと同様に機能するはずだと予測します。 これらの条件下では、必要な離脱能力は損なわれていないはずです(ネットワークが損傷していないため、または損傷したネットワークが必要とする空間の側にキューが提示されているため) から離脱することができる)。
バリント症候群
前述したように、追加の病変データは、両側頭頂病変を患ったバリント症候群患者から得られています。これらの患者の最も顕著な特徴は、同時失認、つまり同時に提示された複数の物体を認識できないことです (レビューについては [[@Farah90]] を参照)。興味深いことに、そのような被験者をポズナー課題 ([[@CoslettSaffran91]]) でテストしたところ、注意効果の * レベルの低下 (つまり、無効と有効の差が小さい) が示されました。 [[@^CohenRomeroFarahEtAl94]] で強調されているように、これらのデータは、Posner らが提示した頭頂部機能の「離脱」説明に対する重要な議論を提供しており、その説明では代わりに、無効な試験での両側性の低下(すなわち、離脱の困難)を予測することになる。観察されたデータのパターンは、私たちが調査してきたモデルから自然に外れます。
- この条件をシミュレートするには、まず
TestをStdPosnerに戻し、次に以前と同様にLayersに対してLesionとLesion spat12を実行し、Locationsを半分ではなくLesionFullに設定します (単位を維持します)LesionHalf)。Networkを見ながらInit、Step Trialを実行し、次にTest Trial Plotを見ながらTest Runを数回実行します。 次に、TrialStatsテーブルをクリックします。
{id=”question_balints”}
両側性損傷ネットワークに対する
TrialStatsの結果を報告します。
最後に、より重度の病変が頭頂部の空間表現に及ぼす影響を調べることができます。これにより、半側空間無視 (通常は単に 無視 と呼ばれます) として知られる症候群のより適切なモデルが提供される可能性があります。前述したように、無視は頭頂皮質(通常は右半球)の片側の病変から生じ、患者は一般に空間の病変側を無視することになります。以前に行った片側の損傷と同様の損傷を実行することによって、無視をシミュレートしますが、各位置の両方の空間ユニットに損傷を与えます。
- 前と同様に、
Layersに対してLesionとLesion spat12を実行し、LocationsをLesionHalfに設定しますが、UnitsをLesionFullに設定します。StdPosnerを使用していくつかのTest Runを実行します。
強力な「無視」現象が発生し、ネットワークがターゲットを検出するために空間の損傷した側に注意を切り替えることが完全に不可能になります (その結果、無効なケースのセトリングが 220 サイクルすべて完了することになります)。
- 次に、
TestをMultiObjに変更し、Networkを見ながらInit、Step Trialを実行します。
より顕著なオブジェクトが空間の損傷した側にある場合でも、ネットワークは依然として無傷な側に注意を向けていることに注目してください。したがって、この損傷した側を特に無視しています。最初のケースでは、これによりネットワークがキュー オブジェクト表現をアクティブ化しますが、ネットワークのセトリングは停止せず、セトリングが 220 サイクル続きます。
興味深いことに、ReversePosner のケースを実行すると、すべての注意効果が完全に除去され、そのため、3 つの条件すべてで整定時間が比較的似ています。これは、ネットワークが空間の損傷した側の刺激を処理できないためではありません。ネットワーク内の活性化を見ると、ネットワークがキューを処理していることがわかります。その代わりに、空間の良い側に提示されたターゲットは、損傷した側の手がかりの弱い残留表現と何の困難もなく競合します。競争は、宇宙の無傷の側に入る他の競合する刺激(比較的弱いのに競争に勝つ可能性がある)が実際に存在しないことは非常にまれであるため、無視される一般的な傾向を説明できます。そのため、通常は無傷の側に注意が集中します。
ポズナー課題での標的検出時間の低下を引き起こすより小さなレベルの損傷は、「消滅」現象とより密接に関連している可能性があります。この現象では、片側頭頂病変を持つ患者は、空間の善側に提示される比較的強い競合する視覚刺激がある場合にのみ無視されます(たとえば、ポズナー課題の無効な試行における合図)。したがって、このモデルは、損傷の重症度と位置の両方に応じて、頭頂部損傷に関連するさまざまな空間処理欠陥を広範囲に考慮できる可能性があります。
時間的ダイナミクスと帰還の阻害
ポズナーの空間的合図タスクのもう 1 つの興味深い側面は、注意の合図効果の時間的ダイナミクスに関係しています。この時点まで、我々は、キューの活性化がターゲットの開始点まで持続すると仮定することにより、タスクのこれらの側面を無視してきました。これは、ターゲットが比較的短い遅延 (たとえば、約 100 ミリ秒) の後にキューに従うときの実験条件に対応します。ただし、Posner タスクは、キューとターゲット間の遅延を長くして (例: 500 ミリ秒) 実行され、いくつかの興味深い結果が得られました。無効なトライアルに対する有効なトライアルの促進効果の代わりに、有効なトライアルと無効なトライアルの順序は実際には、長い遅延で逆転します ([[@Maylor85]])。この現象は、十分な遅延の後にシステムがキューの位置に注意を戻すことを妨げる何かがあるという考えを示すために、復帰の阻害と名付けられました。
私たちのモデルは、さまざまな遅延にわたる Posner タスクの動作の定性的パターンを少なくともシミュレートするために使用できます。これは、キュー提示の長さを変えることによって行われ(可変遅延イベントを挿入することもできますが、いずれにしても残留活性化が持続するため、キューの長さを変える方が簡単です)、ナトリウムゲートカリウム(KNa)適応電流をオンにすることで、しばらく活動していたニューロンを「疲労」させます。したがって、キューのアクティブ化が十分に長く続くと、それらの空間表現は疲労し、その後注意がそこに向けられると、実際にはネットワークの応答が遅くなります。 また、空間アクティベーションが疲労しているため、無効なキューのトライアルに関して他の場所のアクティベーションと競合しなくなり、速度低下が解消されます。
では、これをモデルで見てみましょう。
- まず、
Lesionを実行し、Layersに対してNoLesionを選択して、ネットワークの損傷を解除します。次に、TestをStdPosnerに設定します。次に、KNaAdaptのトグルをクリックしてオンにし、適応をオンにします。次に、調整チャンネルがアクティブであっても、結果の元のパターンが生成されるキューの継続時間を選択しましょう。Cue cyclesを 50 に設定します。ここで、通常どおりInit、Step Trial、およびTest Runを実行します。
有効な促進と無効な減速という、今ではよく知られたパターン (ただし、少し弱い) を観察する必要があります。
Test Runの期間は 50 から 300 以上まで 50 ずつ増加します (Cue cyclesフィールドを使用して変更します)。
継続時間が長くなるにつれて、有効と無効の差が徐々に減少し、最終的には、有効にキューが与えられた状態が、無効にキューが与えられた状態よりも実際には少し *遅くなる可能性があることがわかります。これは、リターンの阻害現象の特徴です (図 8.28)。ここでの適応の形態は比較的弱いため、ここでの効果の大きさはかなり小さいです。より実質的な効果を生み出すには、より重要な GABA-B のような遅延抑制効果 (現在は実装されていません) が必要となります。
Networkに切り替え、Cue cyclesを 300 以上でネットワークを実行して、Step CycleとStep Trialを設定します。
{id=”question_ior”}
戻り抑制効果を生み出す有効な試験と無効な試験で何が起こったかを詳細に報告してください。キューの継続時間が増加するにつれて、さまざまなレイヤーのアクティブ化 (またはアクティブ化の欠如) を観察すると便利です。指定した持続時間の範囲に変化が見られるはずですが、リターン効果を完全に抑制するには、キューの持続時間をさらに長くする必要がある場合があります。
オブジェクトベースの注意効果
これまで、空間を介した注意効果について調査してきました。ただし、まったく同じメカニズム (およびモデル) を使用して、オブジェクトベースの注意効果を理解することができます。たとえば、空間の 1 つの領域をキューする代わりに、1 つのオブジェクトをキューし、そのキュー オブジェクトと別の別のオブジェクトを含む表示を提示して、2 つのオブジェクトのどちらがより容易に処理されるかを判断できます。 Posner の空間キューイング パラダイムから類推すると、キューされたオブジェクトは、キューされていないオブジェクトよりも容易に処理されることが予想されます。もちろん、キュー自体に基づくターゲット検出応答を除外するには、異なるが類似したキューとターゲット オブジェクトを使用する必要があります。
単純な物体認識タスクには問題があるため、実験的に実行された物体ベースの注意研究では、通常、1 つの物体に対する 2 つの操作 (小さな視覚的ターゲットの検出など) と 2 つの異なる物体に対する 2 つの操作の比較が行われます。これらの操作に関連する空間距離が 2 つの条件で同じである場合、反応時間の差異は、2 つのオブジェクト間で注意を切り替えるためのコストを示します。このようなオブジェクトのコストは、多くの研究で判明しています ([[@Duncan84]]、[[@VeceraFarah94]]、[[@MozerZemelBehrmannEtAl92]])。
シミュレータでは、内部表現に透過的にアクセスでき、オブジェクト処理の促進を直接測定できるため、Posner タスクに似た単純なキューイング実験を実行できます。
- これらのパターンを確認するには、
TestをObjAttnに設定し、Initを実行して、ObjAttnをクリックします。
最初のイベントはコントロール条件であり、事前の合図なしで 2 つのオブジェクトを提示します。 MultiObj の場合と同様、ターゲット オブジェクトはキュー オブジェクトよりも強力にアクティブ化されるため、ネットワークはターゲット オブジェクトを処理することに注意してください。次のイベントはキューイング イベントで、キュー オブジェクトが中央の位置に表示されます。次に、同じグループ内でアクティベーションが持続するように、次のイベントでは最初のイベントと同様に 2 つのオブジェクトが表示されます。したがって、前のオブジェクト キューが効果的であれば、ネットワークがターゲットではなくキュー オブジェクトを処理するように、2 つのオブジェクト間のボトムアップ顕著性の比較的小さな差を克服できるはずです。最後に、次の 2 つのイベントは、2 つのオブジェクトが同じ場所に表示される場合です。以前は、この場合、空間的に重複しているオブジェクトを処理するためにネットワークがどちらのオブジェクトも選択できなかったことを思い出してください。おそらく、オブジェクトベースの注意キューにより、ネットワークはキューオブジェクトに集中できるようになるでしょう。
KNaAdaptがオフであり、Cue cyclesが 100 に戻っていることを確認して (またはDefaultsを押して)、Init、Test Runを実行し、時間を巻き戻して、ネットワークが各タスク条件にどのように詳細に応答するかを確認します。
前のオブジェクトのキューが実際に、同じオブジェクトを優先して後続の処理に影響を与える可能性があることに注意してください。空間システムが適切な方法でこれに応答することにも注意してください。つまり、キューされたオブジェクトに関連付けられた空間位置がアクティブになります。最後に、2 つのオブジェクトが同じ場所で重なって表示される場合、システムが 1 つのオブジェクト (アクティブでないオブジェクトであっても) を選択できるようにするには、トップダウンのオブジェクト キューで十分であることに注意してください。